
WAVE ROVER ഫ്ലെക്സിബിൾ ആൻഡ് എക്സ്പാൻഡബിൾ 4WD മൊബൈൽ റോബോട്ട് ചേസിസ് ESP32-നോടൊപ്പം
Rs. 9,900.00
ഉൽപ്പന്ന വിവരങ്ങളിലേക്ക് പോകുക












WAVE ROVER ഫ്ലെക്സിബിൾ ആൻഡ് എക്സ്പാൻഡബിൾ 4WD മൊബൈൽ റോബോട്ട് ചേസിസ് ESP32-നോടൊപ്പം
Rs. 9,900.00
WAVE ROVER ഫ്ലെക്സിബിൾ ആൻഡ് എക്സ്പാൻഡബിൾ 4WD മൊബൈൽ റോബോട്ട് ചേസിസ്
ഫുൾ മെറ്റൽ ബോഡി, മൾട്ടിപ്പിൾ ഹോസ്റ്റുകൾക്കുള്ള സപ്പോർട്ട്, ഓൺബോർഡ് ESP32 മൊഡ്യൂളിനൊപ്പം
സവിശേഷതകൾ
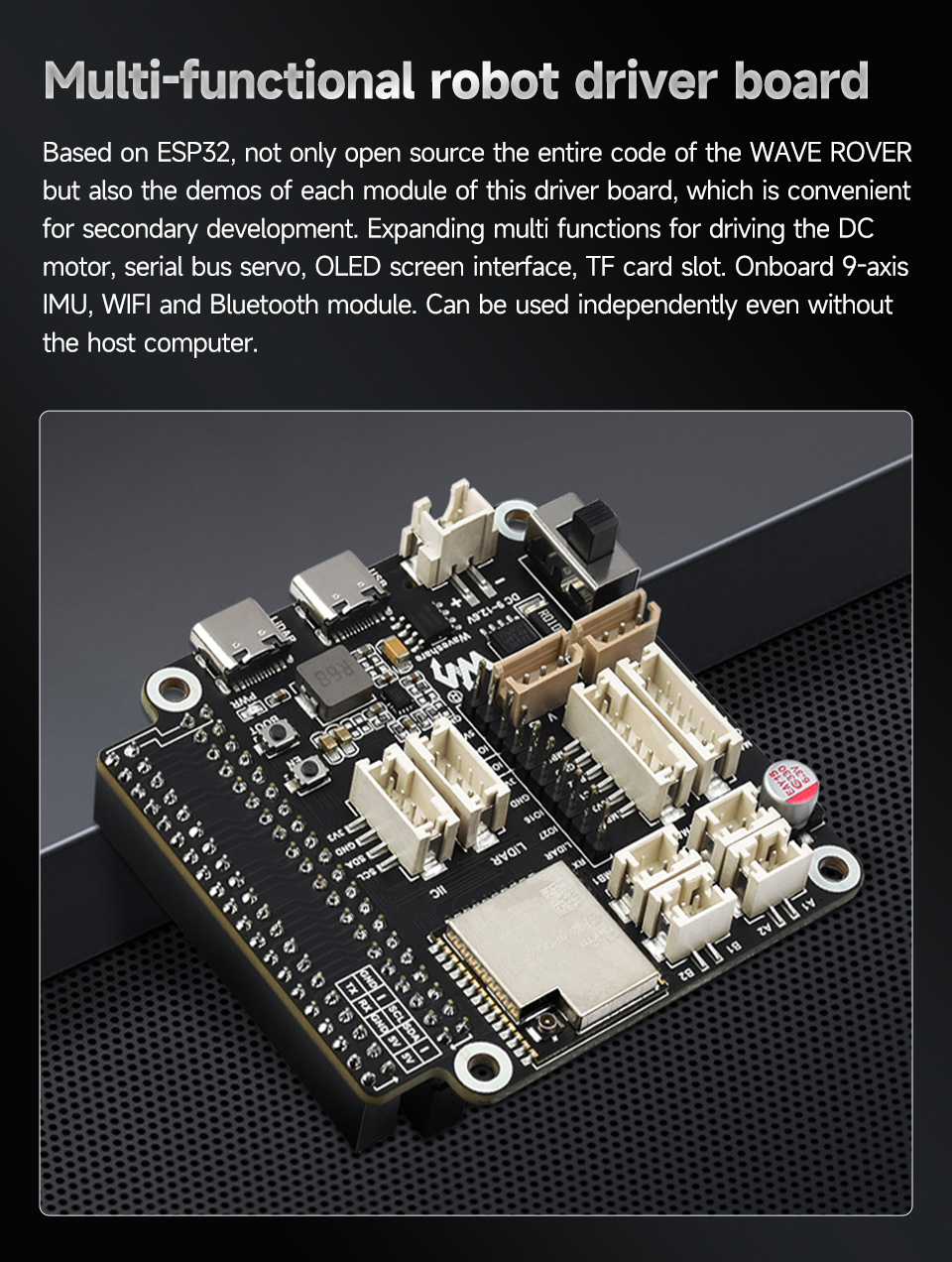
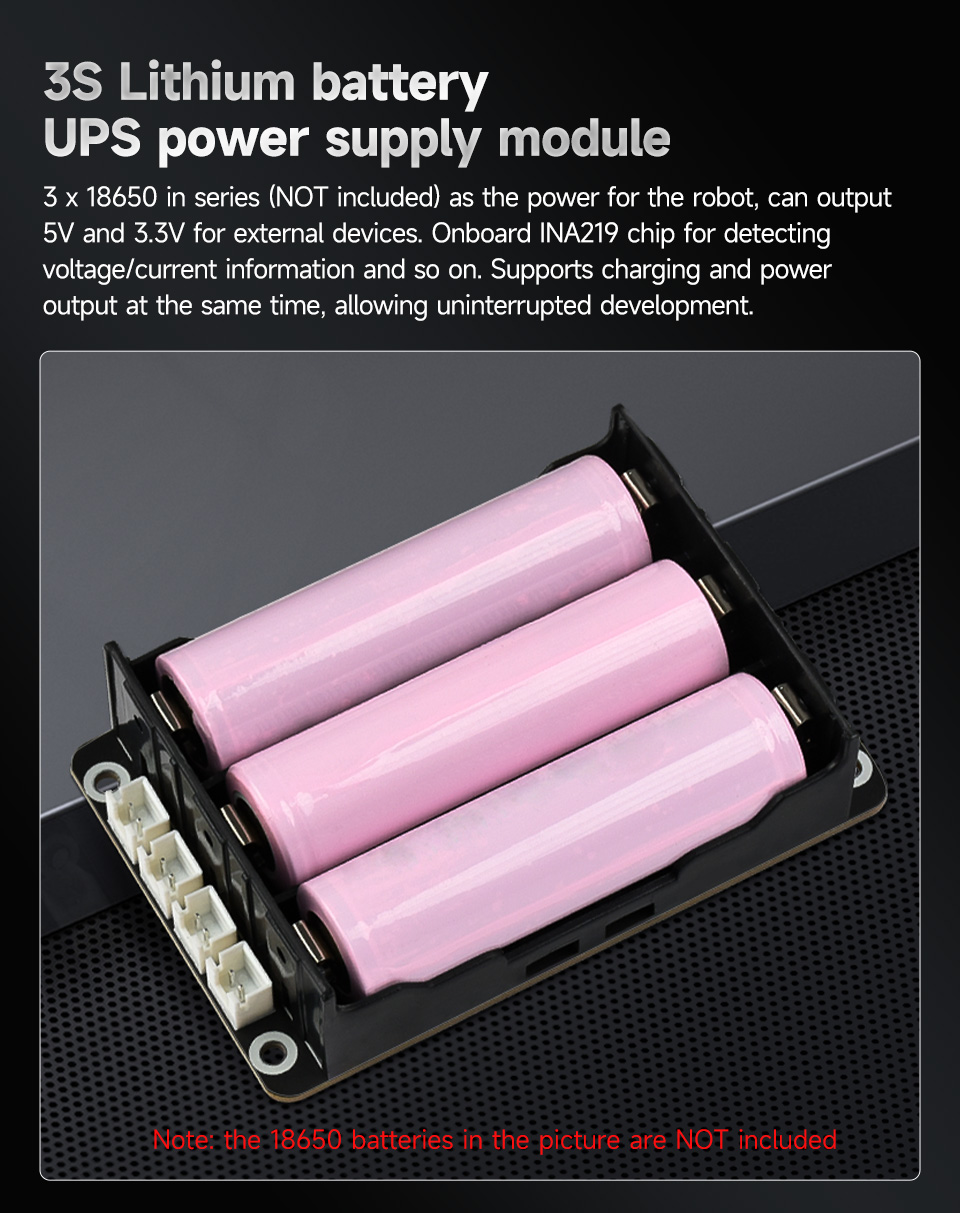
മികച്ച ഓഫ്-റോഡ് ക്രോസിംഗ് കഴിവുകളും ഷോക്ക്-അബ്സോർബിംഗ് പ്രകടനവുമുള്ള ഒരു ഫുൾ മെറ്റൽ ബോഡി 4WD മൊബൈൽ റോബോട്ട് ചേസിസ് ആണ് WAVE ROVER. സെക്കൻഡറി ഡെവലപ്മെന്റിനായി എല്ലാ കോഡുകളും ഓപ്പൺ സോഴ്സ് ചെയ്തിരിക്കുന്നു. ഇത് ഒന്നിലധികം ഹോസ്റ്റ് കമ്പ്യൂട്ടറുകളെ (Raspberry Pi, Jetson Nano, Jetson Orin Nano, മുതലായവ) പിന്തുണയ്ക്കുന്നു, ഹോസ്റ്റ് കമ്പ്യൂട്ടറിന് സീരിയൽ പോർട്ട് വഴി ESP32 സ്ലേവ് കമ്പ്യൂട്ടറുമായി ആശയവിനിമയം നടത്താൻ കഴിയും. ഉയർന്ന നിലവാരമുള്ള ഗിയർബോക്സ് ഉപയോഗിച്ച് നാല് N20 ഗിയർഡ് മോട്ടോറുകൾ ഘടിപ്പിച്ചിരിക്കുന്നു, ഇത് മൊബൈൽ റോബോട്ടിന് മികച്ച ശക്തിയോടെ ഉയർന്ന വേഗതയിൽ ഓടാൻ സഹായിക്കുന്നു. ബിൽറ്റ്-ഇൻ 3S യുപിഎസ് പവർ സപ്ലൈ മൊഡ്യൂൾ, 3 x 18650 ലി ബാറ്ററികളെ (സീരീസായി, ഉൾപ്പെടുത്തിയിട്ടില്ല) പിന്തുണയ്ക്കുന്നു, ഇത് റോബോട്ടിന് തടസ്സമില്ലാത്ത വൈദ്യുതി നൽകുകയും ഒരേ സമയം ചാർജ് ചെയ്യാനും പവർ ഔട്ട്പുട്ട് ചെയ്യാനും സഹായിക്കുന്നു. സീരിയൽ ബസ് സെർവോകൾ പ്രവർത്തിപ്പിക്കുന്നതിനും PWM സിഗ്നൽ ഔട്ട്പുട്ട് ചെയ്യുന്നതിനും TF കാർഡ് സ്ലോട്ട് വികസിപ്പിക്കുന്നതിനും മറ്റുമായി ഓൺബോർഡ് വൈഫൈയും ബ്ലൂടൂത്തും സഹിതം ESP32 അടിസ്ഥാനമാക്കിയുള്ള മൾട്ടി-ഫങ്ഷണൽ റോബോട്ട് ഡ്രൈവർ ബോർഡ് ഇതിൽ ഉൾപ്പെടുത്തിയിരിക്കുന്നു.
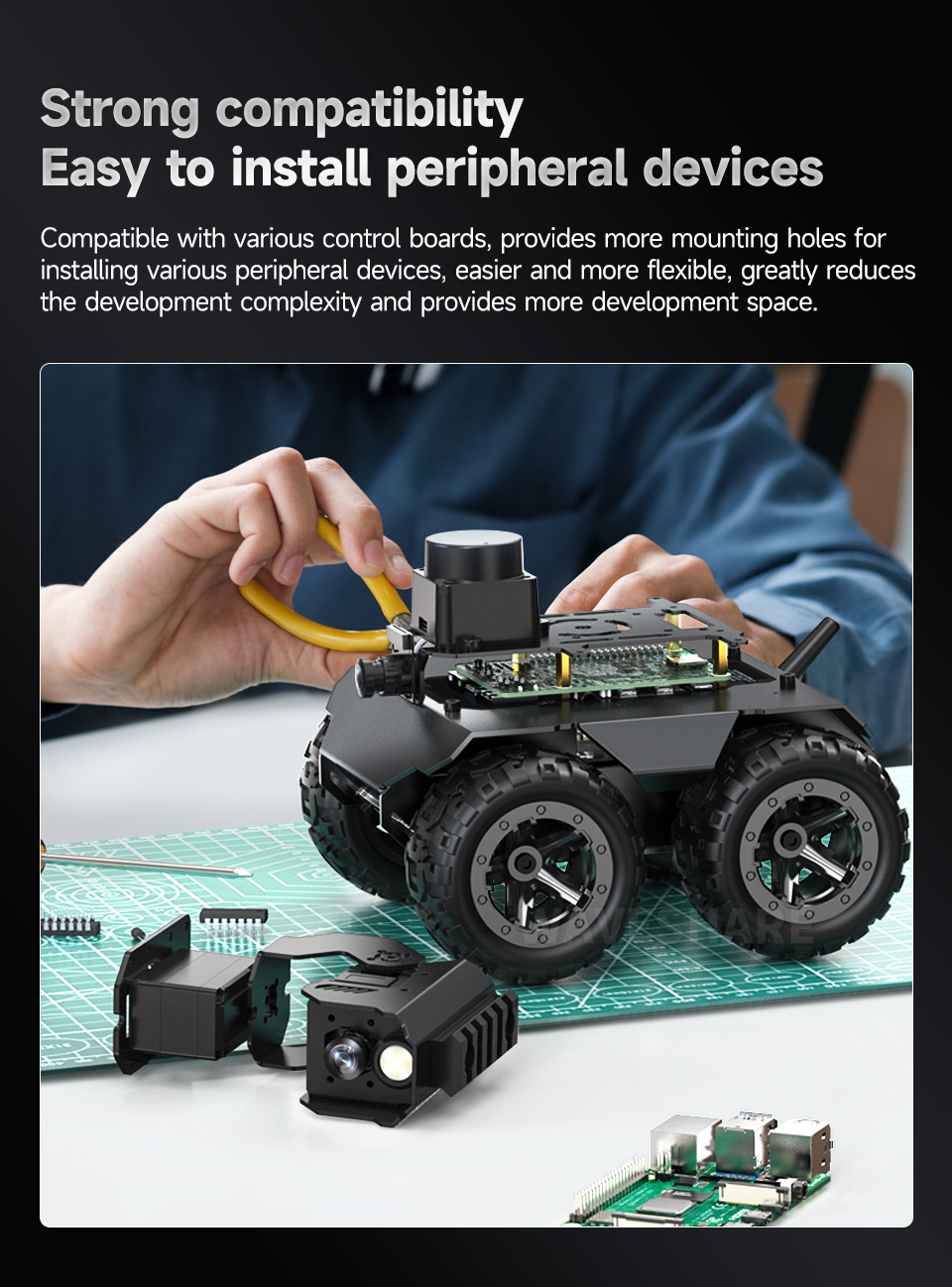
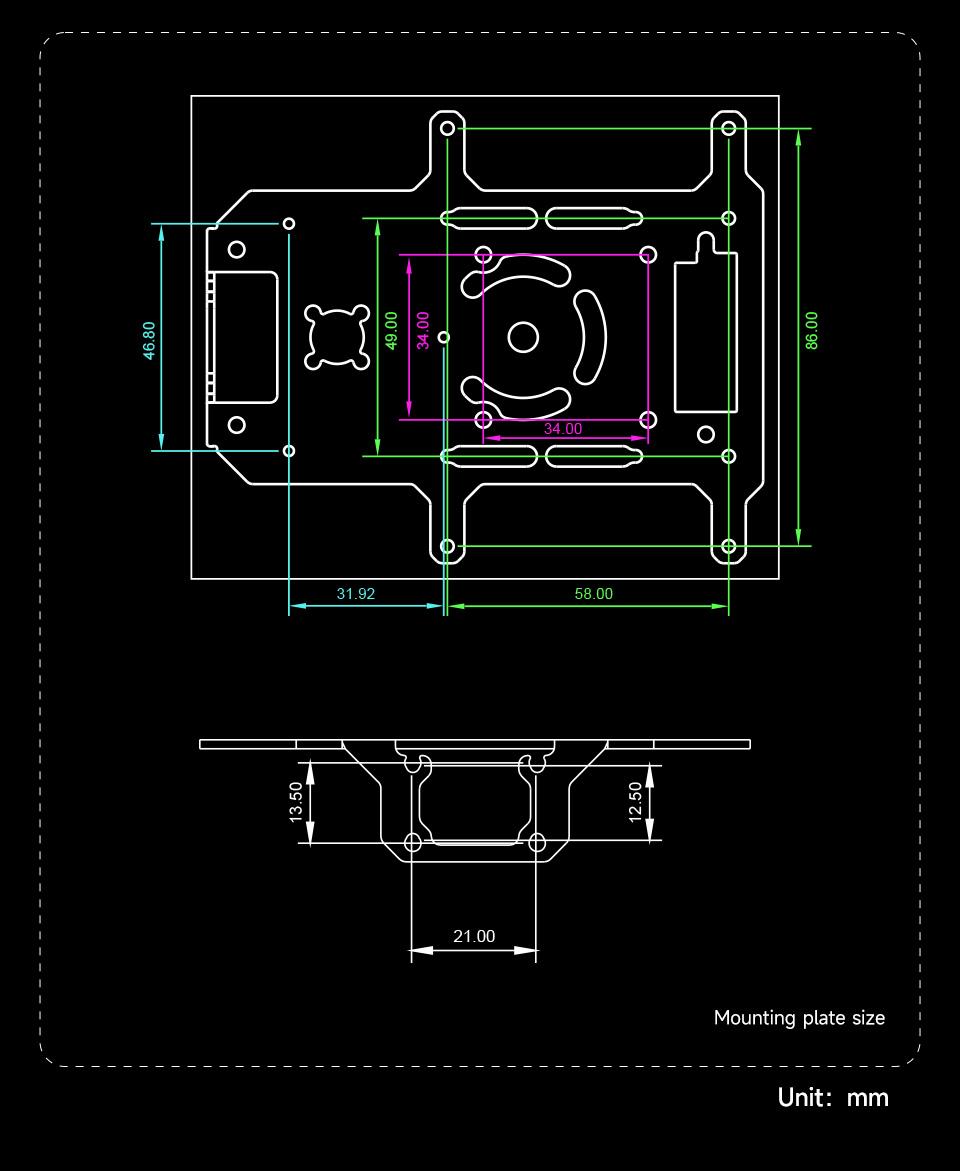
സങ്കീർണ്ണമായ ഭൂപ്രദേശങ്ങളുടെ ആഘാതം ഗണ്യമായി കുറയ്ക്കുന്ന ഫ്ലെക്സിബിൾ റബ്ബർ ടയറുകളാണ് WAVE ROVER-ൽ ഉപയോഗിച്ചിരിക്കുന്നത്. ഉയർന്ന വേഗതയിലുള്ള ഡ്രൈവിംഗ്, ഷോക്ക് അബ്സോർപ്ഷൻ, ഓഫ്-റോഡ് എന്നിവയുടെ ആവശ്യങ്ങൾ എളുപ്പത്തിൽ നിറവേറ്റാൻ ഇതിന് കഴിയും. ഒരു മൗണ്ടിംഗ് പ്ലേറ്റുമായിട്ടാണ് ഇത് വരുന്നത്, ഹോസ്റ്റ് കമ്പ്യൂട്ടറുകൾ (Raspberry Pi 4B, Jetson Nano, Jetson Orin Nano, മുതലായവ), LD19/STL-27L ലിഡാർ, പാൻ-ടിൽറ്റ് ക്യാമറ എന്നിവ സ്ഥാപിക്കാൻ ഇത് ഉപയോഗിക്കാം, ഇത് സെക്കൻഡറി ഡെവലപ്മെന്റിന് കൂടുതൽ സാധ്യതകൾ നൽകുന്നു.
വിവരണം
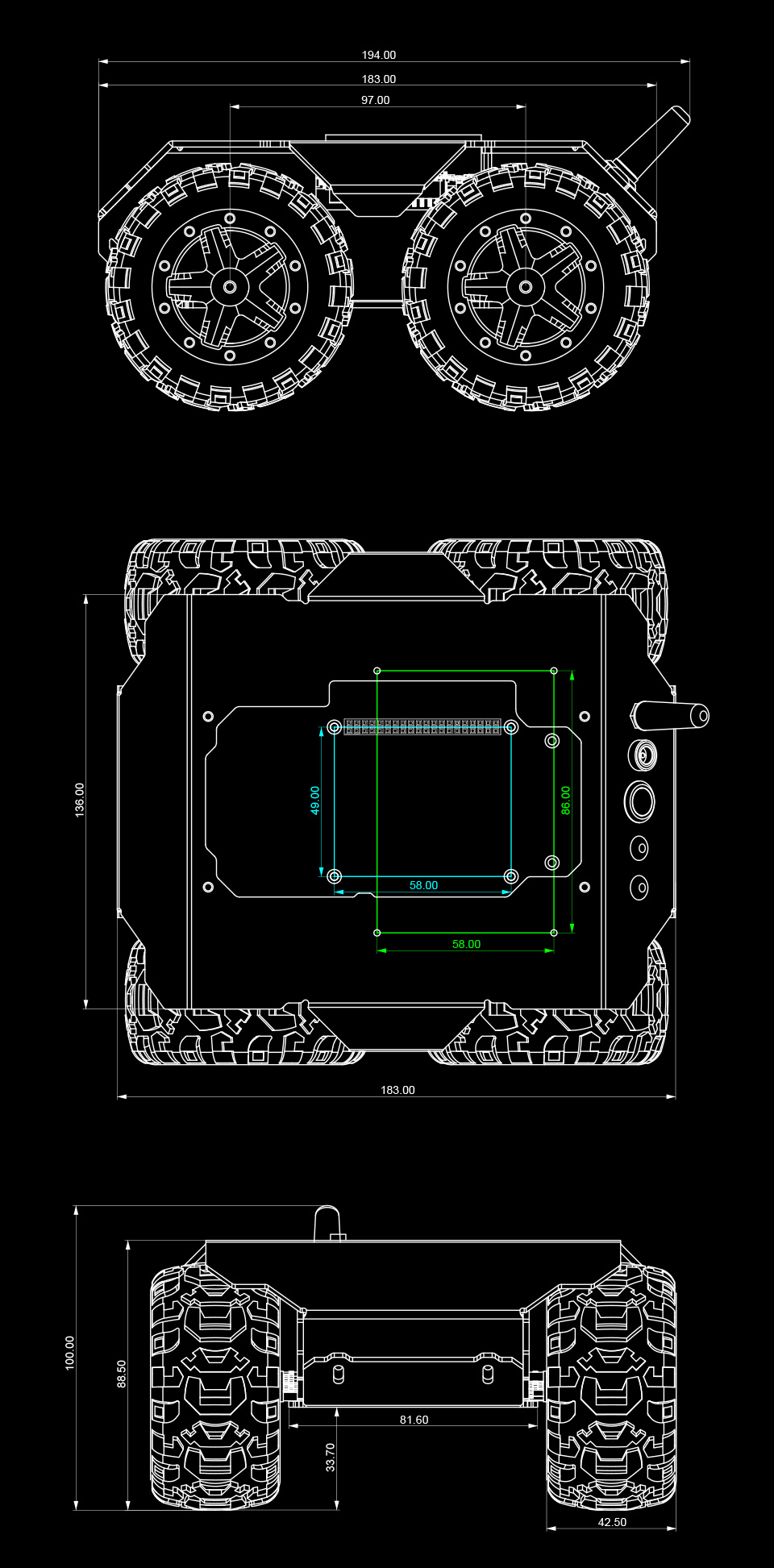
| ഔട്ട്ലൈൻ അളവുകൾ | 194×168×100mm | ടയർ മെറ്റീരിയൽ | നൈലോൺ വീൽ ഹബ്, റബ്ബർ ടയർ |
| ചേസിസ് ഉയരം | 33.70mm | OLED സ്ക്രീൻ | 0.91ഇഞ്ച് |
| ടയർ വീതി | 42.50mm | ഓടുന്ന വേഗത | 1.25m/s |
| ടയർ വ്യാസം | 80mm | ഡ്രൈവിംഗ് വീലുകളുടെ എണ്ണം | 4 |
| മോട്ടോർ | N20 12V 200RPM × 4 |
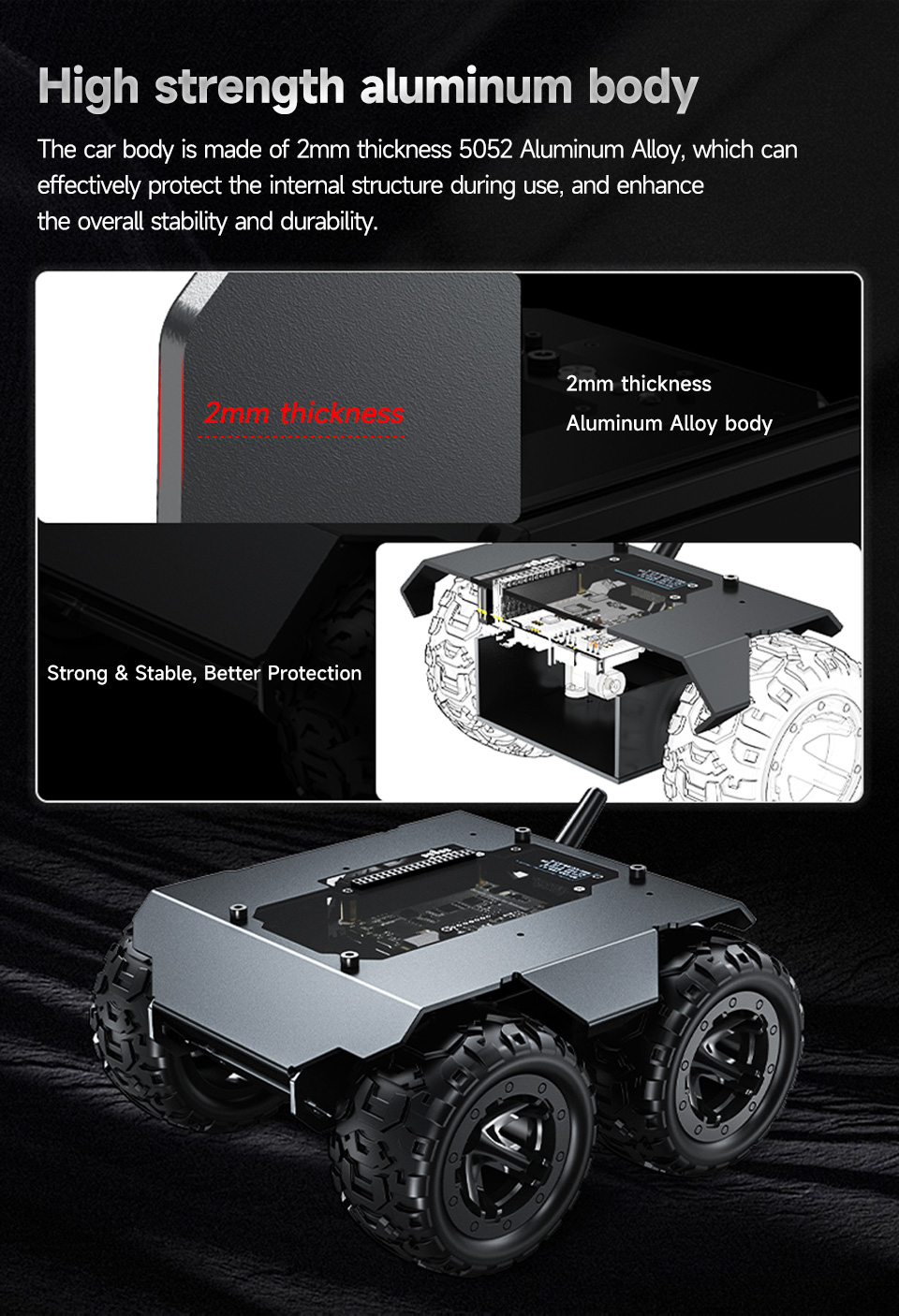
ബോഡി മെറ്റീരിയൽ | 2mm (കനം) 5052 അലുമിനിയം അലോയ് |
| ഭാരം | 860g | ലംബമായ തടസ്സങ്ങൾ മറികടക്കാനുള്ള കഴിവ് | 40mm |
| ഡ്രൈവിംഗ് പേലോഡ് | 0.8kg | കയറാനുള്ള കഴിവ് | 22° |
| ബാറ്ററി പിന്തുണ | 18650 ലിഥിയം ബാറ്ററി × 3 (ഉൾപ്പെടുത്തിയിട്ടില്ല) | കുറഞ്ഞ ടേണിംഗ് റേഡിയസ് | 0m (സ്ഥലത്തുതന്നെ കറങ്ങാൻ) |
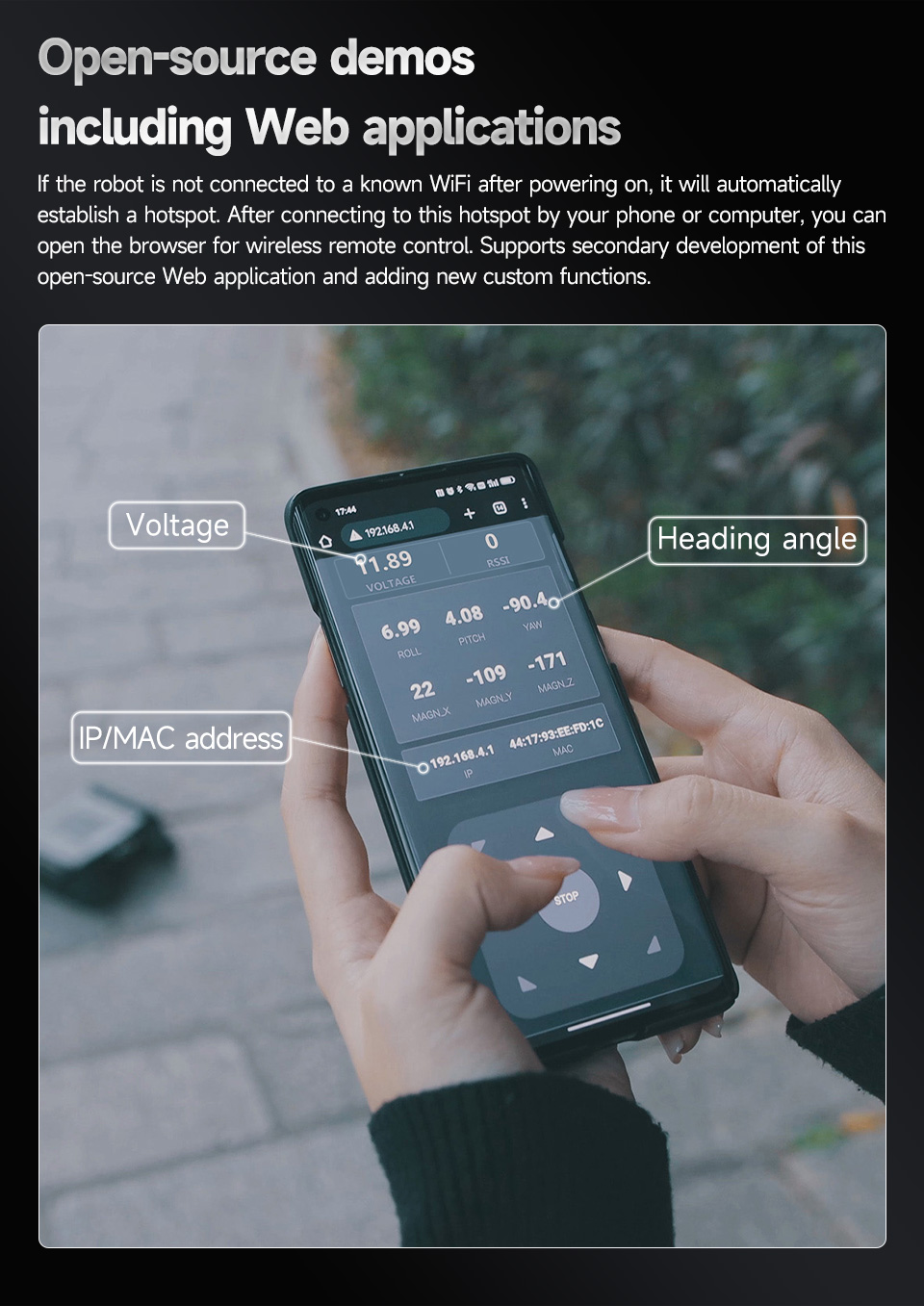
| മോട്ടോർ പവർ | 1.5W × 4 | റിമോട്ട് കൺട്രോൾ ഫംഗ്ഷൻ | WIFI AP/STA |
| മുകളിലെ പ്രതലത്തിന്റെ വിസ്തീർണ്ണം | 17551mm2 | കമ്മ്യൂണിക്കേഷൻ ഇന്റർഫേസ് | UART / സീരിയൽ ബസ് സെർവോ ഇന്റർഫേസ് / I2C |

Jetson Orin Nano-യിലേക്ക് കണക്ട് ചെയ്യുക |

Raspberry Pi 4B-യിലേക്ക് കണക്ട് ചെയ്യുക |
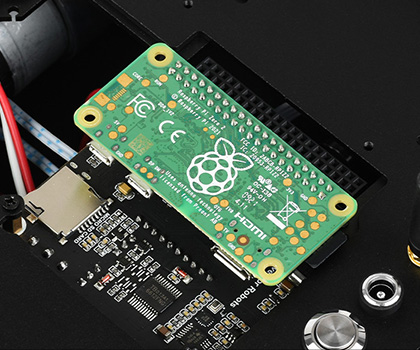
Raspberry Pi Zero-യിലേക്ക് കണക്ട് ചെയ്യുക |
① സ്ലേവ് കമ്പ്യൂട്ടർ ഡ്രൈവർ ബോർഡിനെക്കുറിച്ച് കൂടുതൽ വിവരങ്ങൾക്ക്, ദയവായി General-Driver-for-Robots എന്ന ഉൽപ്പന്ന പേജ് കാണുക.
② ലിഡാറും ഹോസ്റ്റ് കമ്പ്യൂട്ടറും തമ്മിലുള്ള ഡാറ്റാ കൈമാറ്റത്തിനായി UART മുതൽ USB വരെയുള്ള സർക്യൂട്ട് ഡ്രൈവർ ബോർഡിൽ ഓൺബോർഡ് ആയിട്ടുണ്ട്.
അളവുകൾ
വാട്ട്സ്ആപ്പ് കോൺടാക്റ്റ്: +918921464198