
वेव रोवर फ्लेक्सिबल और एक्सपेंडेबल 4WD मोबाइल रोबोट चेसिस ESP32 के साथ
Rs. 9,900.00
उत्पाद जानकारी पर जाएं












वेव रोवर फ्लेक्सिबल और एक्सपेंडेबल 4WD मोबाइल रोबोट चेसिस ESP32 के साथ
Rs. 9,900.00
वेव रोवर लचीला और विस्तारणीय 4WD मोबाइल रोबोट चेसिस
फुल मेटल बॉडी, मल्टीपल होस्ट सपोर्ट, ऑनबोर्ड ESP32 मॉड्यूल के साथ
विशेषताएँ
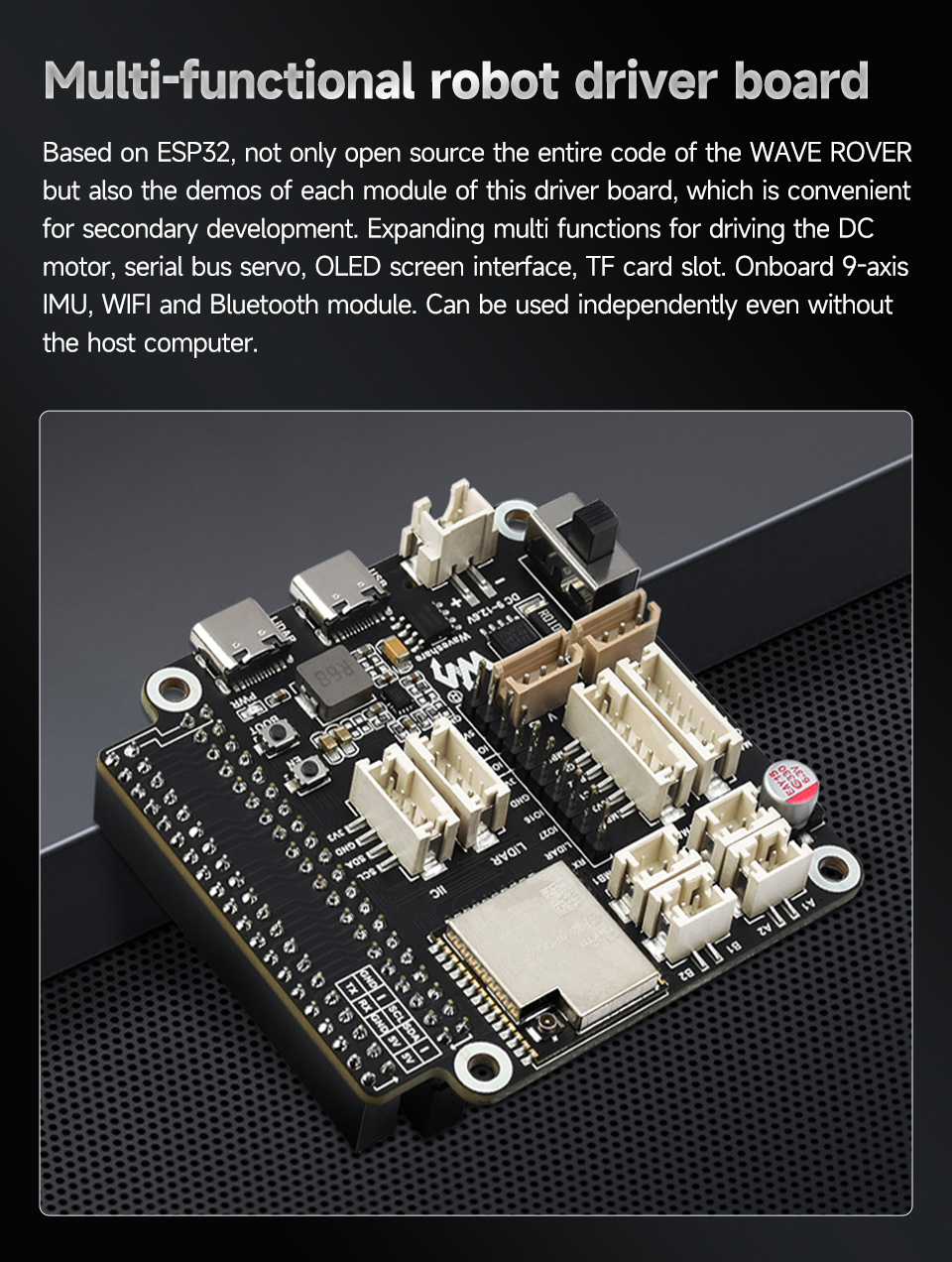
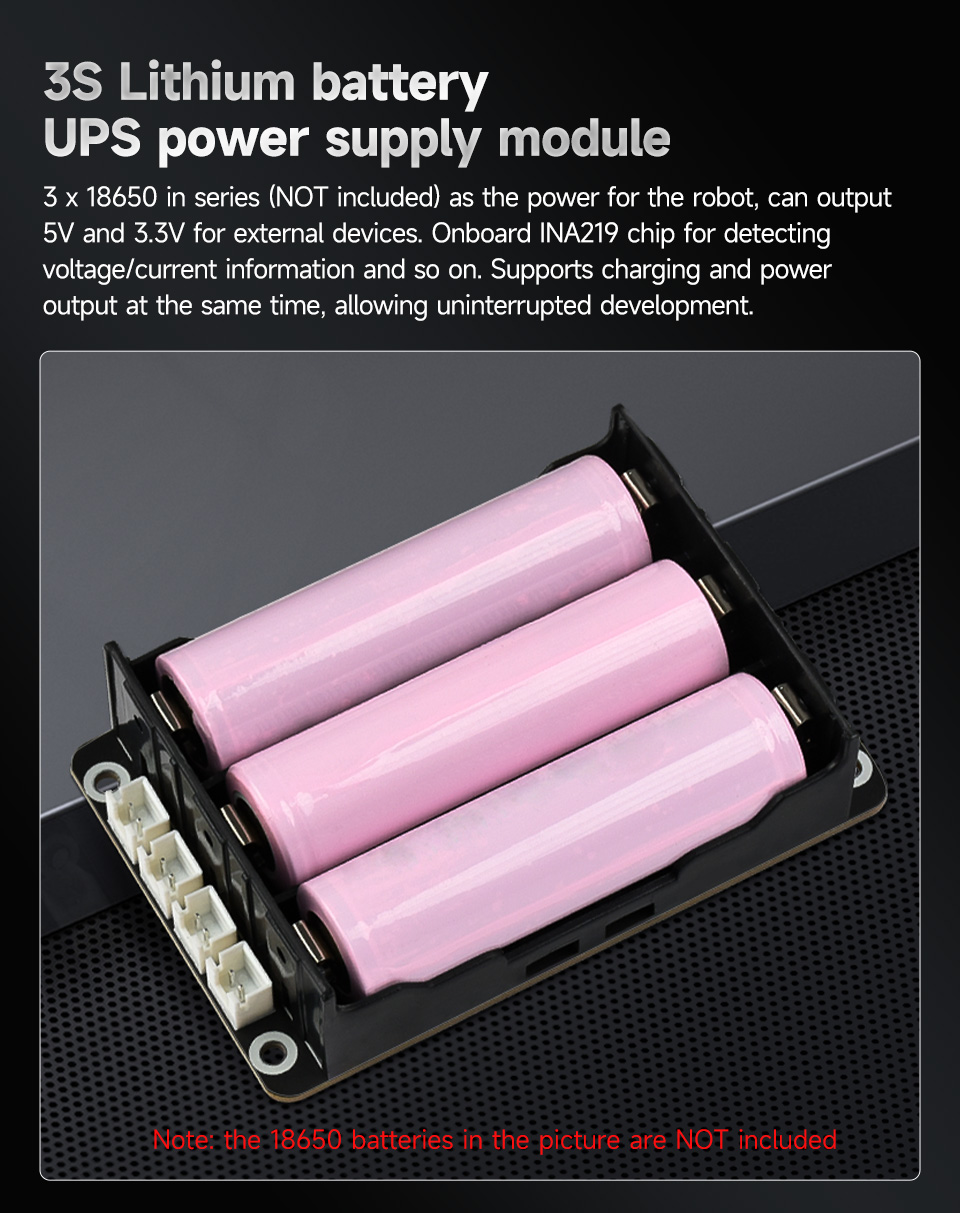
वेव रोवर एक पूर्ण धातु निकाय वाला 4WD मोबाइल रोबोट चेसिस है, जिसमें शानदार ऑफ-रोड क्रॉसिंग क्षमता और शॉक-एब्जॉर्बिंग प्रदर्शन है, माध्यमिक विकास के लिए सभी कोड ओपन सोर्स हैं। यह कई होस्ट कंप्यूटर (रास्पबेरी पाई, जेटसन नैनो, जेटसन ओरिन नैनो, आदि) का समर्थन करता है, होस्ट कंप्यूटर सीरियल पोर्ट के माध्यम से ESP32 स्लेव कंप्यूटर के साथ संचार कर सकता है। उच्च गुणवत्ता वाले गियरबॉक्स का उपयोग करके चार N20 गियर मोटर्स से लैस, जो मोबाइल रोबोट को बहुत शक्ति के साथ उच्च गति पर ड्राइव करने की अनुमति देता है। 3S यूपीएस बिजली आपूर्ति मॉड्यूल में निर्मित, 3 x 18650 ली बैटरी (श्रृंखला में, शामिल नहीं) का समर्थन करता है, जो रोबोट के लिए अबाधित शक्ति प्रदान करता है और एक ही समय में चार्जिंग और बिजली उत्पादन का समर्थन करता है। ESP32 पर आधारित मल्टी-फंक्शनल रोबोट ड्राइवर बोर्ड में निर्मित, ऑनबोर्ड वाईफाई और ब्लूटूथ के साथ, सीरियल बस सर्वो को चलाने, पीडब्ल्यूएम सिग्नल आउटपुट करने, टीएफ कार्ड स्लॉट का विस्तार करने आदि के लिए।
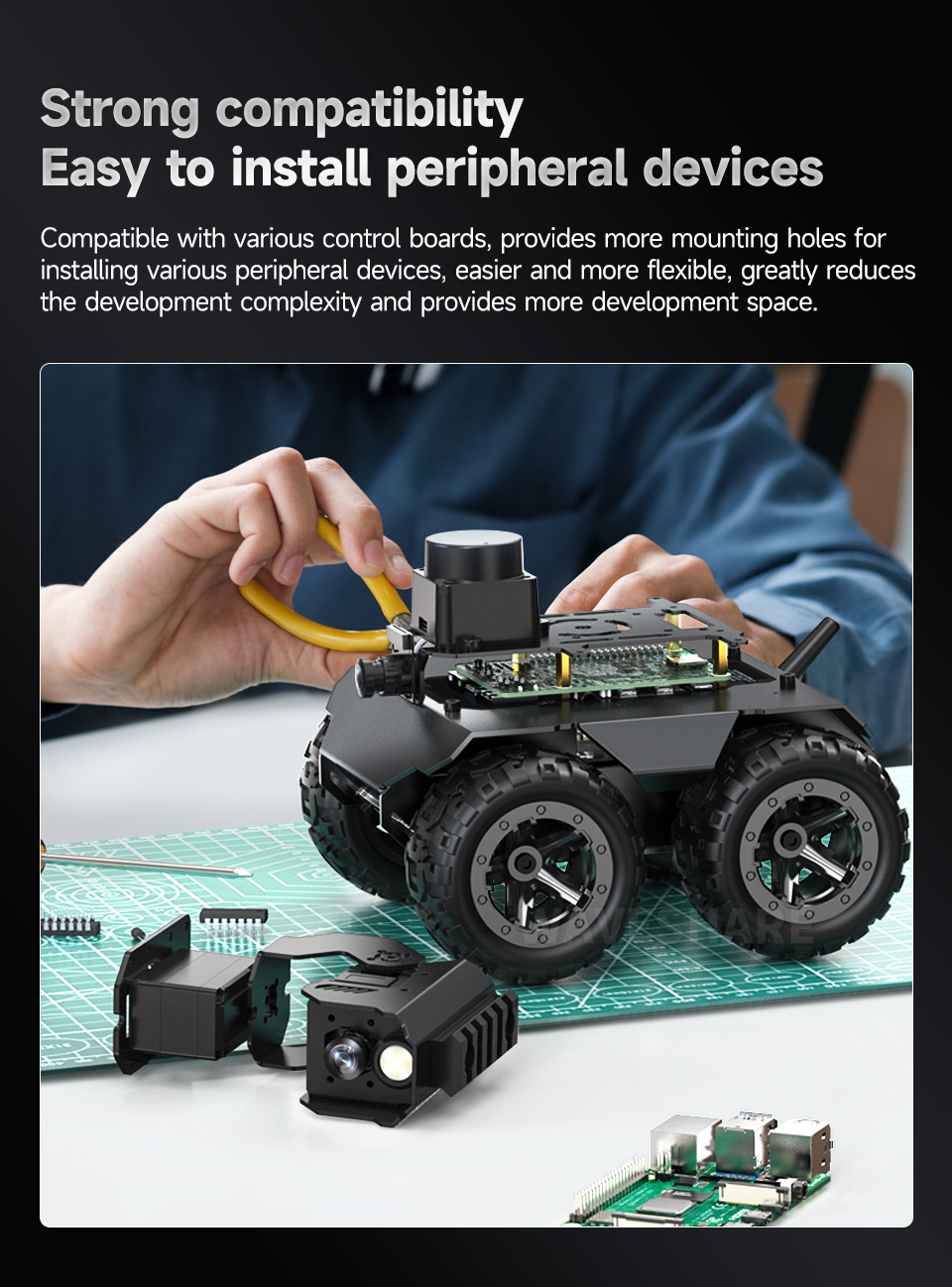
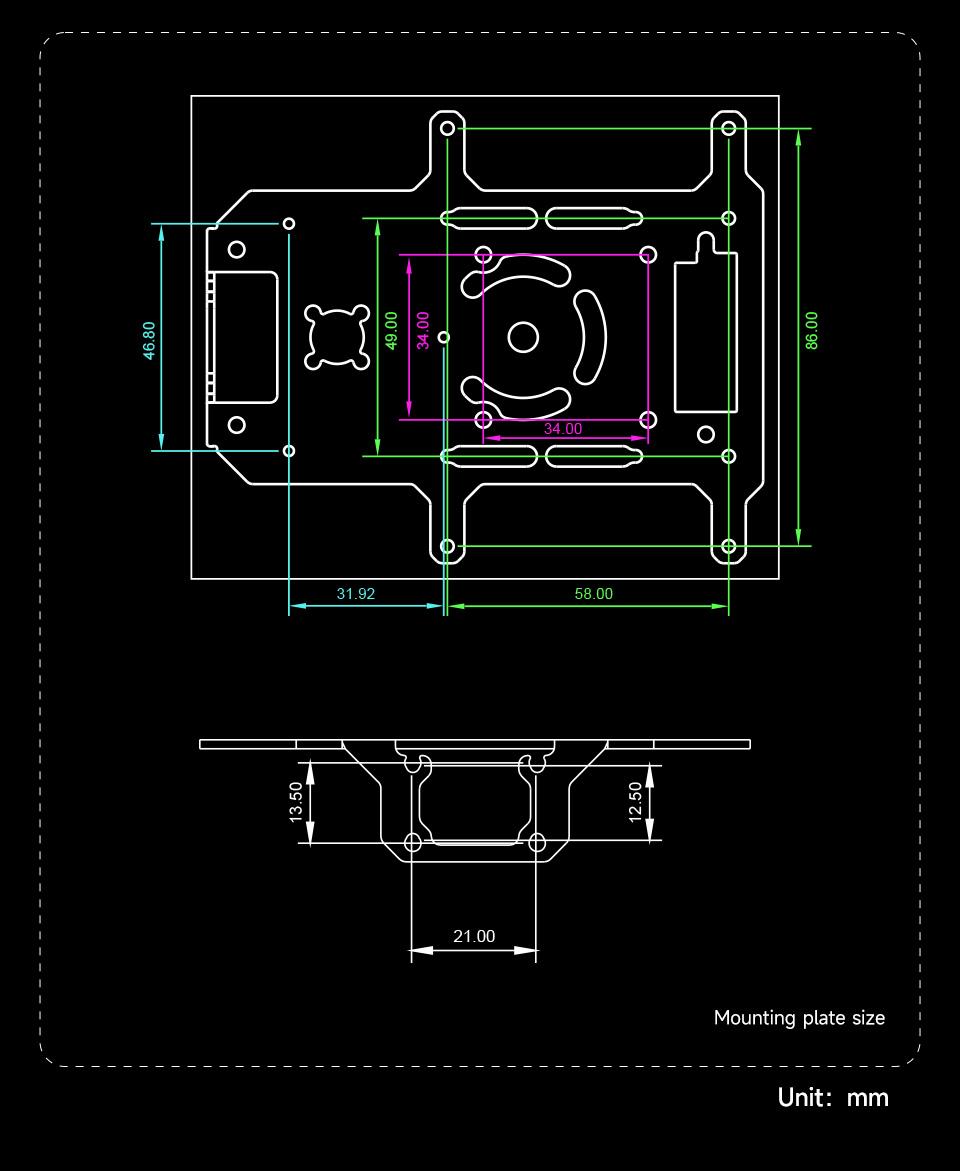
वेव रोवर लचीले रबर टायरों को अपनाता है जो जटिल इलाकों के प्रभाव को काफी कम करते हैं, उच्च गति ड्राइविंग, शॉक अवशोषण और ऑफ-रोड की जरूरतों को आसानी से पूरा कर सकते हैं। एक माउंटिंग प्लेट के साथ आता है, जिसका उपयोग होस्ट कंप्यूटर (रास्पबेरी पाई 4बी, जेटसन नैनो, जेटसन ओरिन नैनो, आदि), LD19/STL-27L लिडार, और पैन-टिल्ट कैमरा स्थापित करने के लिए किया जा सकता है, जो माध्यमिक विकास के लिए अधिक संभावनाएं प्रदान करता है।
विशेष विवरण
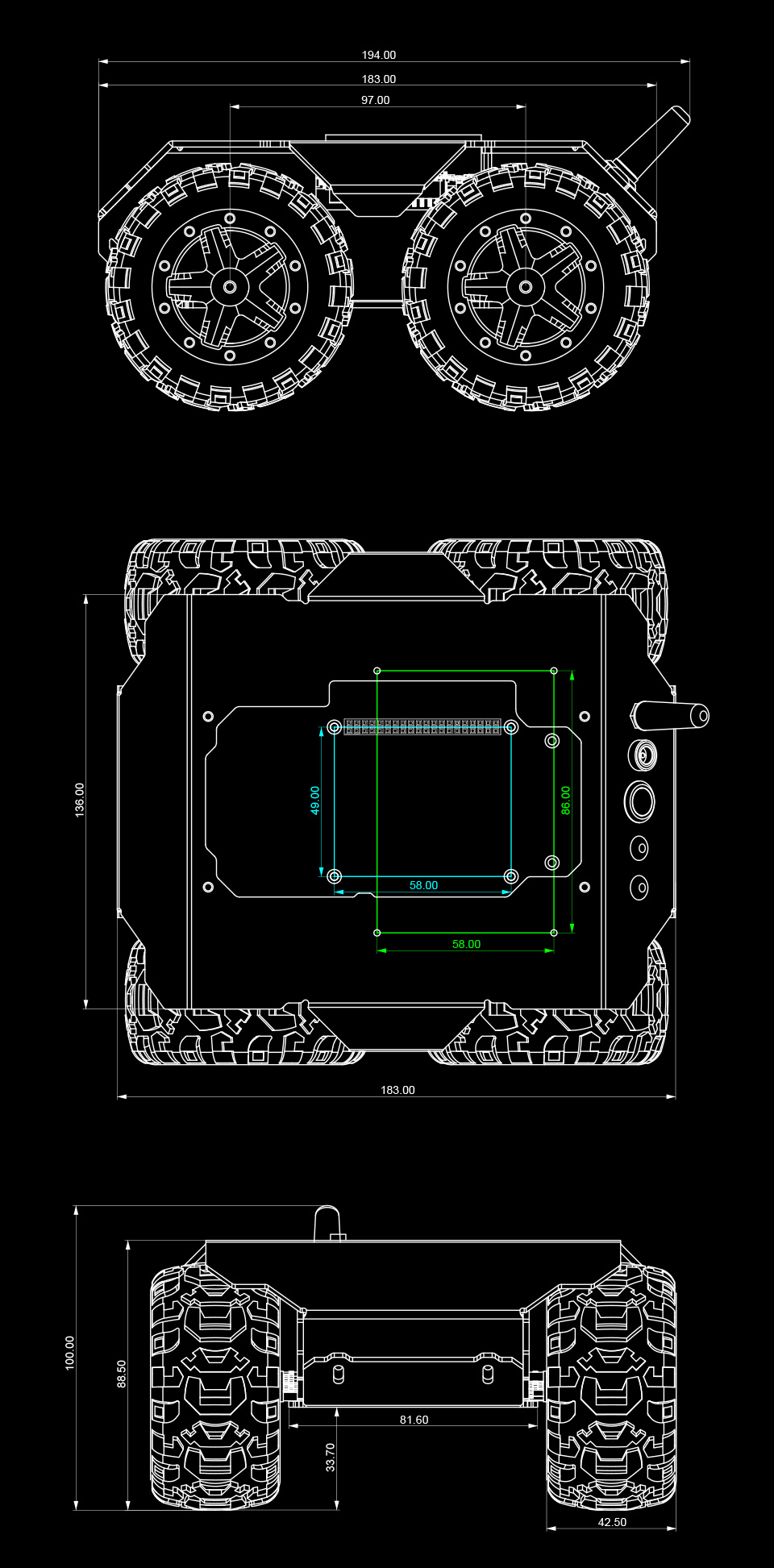
| रूपरेखा आयाम | 194×168×100मिमी | टायर सामग्री | नायलॉन व्हील हब, रबर टायर |
| चेसिस ऊंचाई | 33.70मिमी | ओएलईडी स्क्रीन | 0.91इंच |
| टायर चौड़ाई | 42.50मिमी | चलने की गति | 1.25मी/से |
| टायर व्यास | 80मिमी | ड्राइविंग पहियों की संख्या | 4 |
| मोटर | N20 12V 200आरपीएम × 4 |
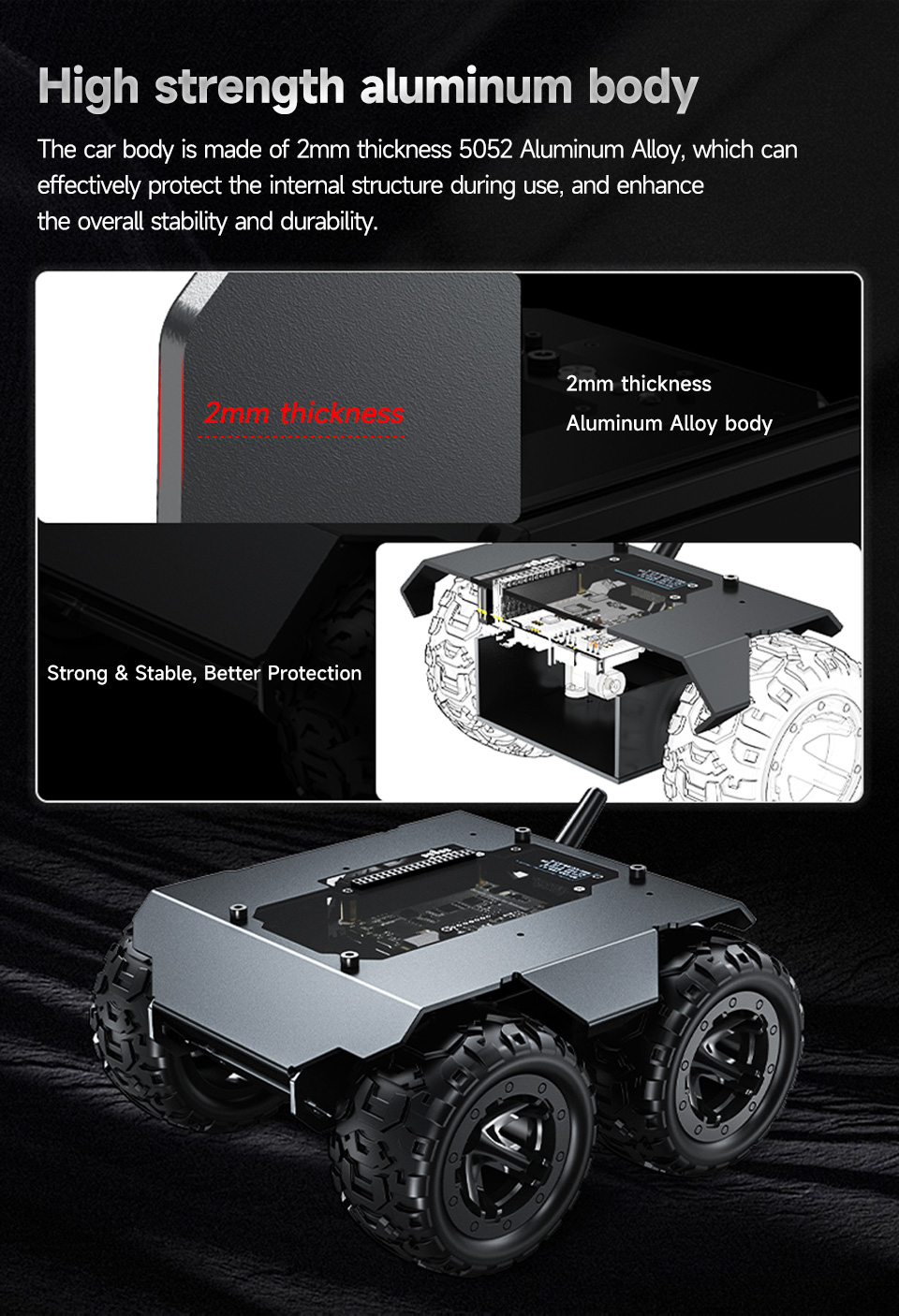
बॉडी सामग्री | 2मिमी (मोटाई) 5052 एल्युमिनियम मिश्र धातु |
| वजन | 860ग्रा | ऊर्ध्वाधर बाधा क्षमता | 40मिमी |
| ड्राइविंग पेलोड | 0.8किग्रा | चढ़ने की क्षमता | 22° |
| बैटरी सपोर्ट | 18650 लिथियम बैटरी × 3 (शामिल नहीं) | न्यूनतम मोड़ त्रिज्या | 0मी (इन-सीटू रोटेशन) |
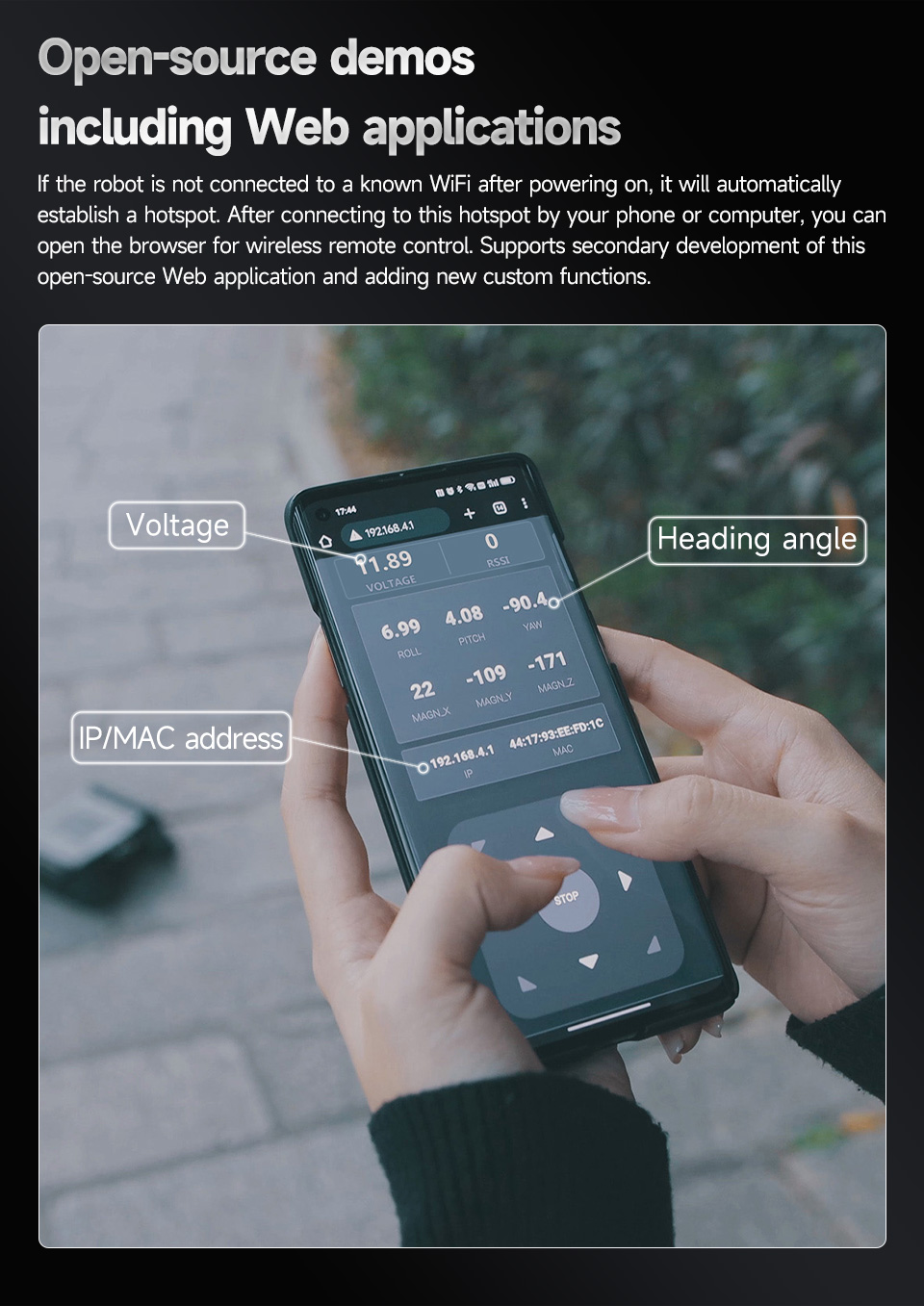
| मोटर शक्ति | 1.5W × 4 | रिमोट कंट्रोल फ़ंक्शन | वाईफाई एपी/एसटीए |
| ऊपरी सतह क्षेत्र | 17551मिमी2 | संचार इंटरफ़ेस | यूएआरटी / सीरियल बस सर्वो इंटरफ़ेस / आई2सी |

जेटसन ओरिन नैनो से कनेक्ट करें |

रास्पबेरी पाई 4बी से कनेक्ट करें |
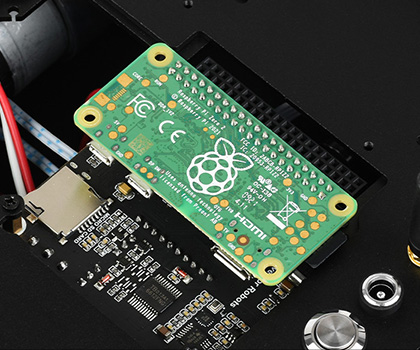
रास्पबेरी पाई जीरो से कनेक्ट करें |
① स्लेव कंप्यूटर ड्राइवर बोर्ड के बारे में, कृपया अधिक जानकारी के लिए General-Driver-for-Robots उत्पाद पृष्ठ देखें।
② ड्राइवर बोर्ड में लिडार और होस्ट कंप्यूटर के बीच डेटा ट्रांसमिशन के लिए ऑनबोर्ड UART से USB सर्किट है।
आयाम
व्हाट्सएप संपर्क: +918921464198